
ispace unveiled the final design of its micro rover, which will be transported to the surface of the Moon by its lunar lander as part of exploration activities during Mission 2.
The design was revealed by ispace Founder and CEO Takeshi Hakamada, during a press conference held in Tokyo, Japan.
“Continuous mission operations are essential to provide lunar transportation and data services, so I am pleased to announce the progress we have made on the Mission 2 lander flight model and the final design of the micro rover. In particular, I am proud of all the employees who have made this possible, who, in the short time since completing Mission 1 nearly six months ago, have incorporated the necessary improvements to advance this mission on schedule,” said Founder and CEO Hakamada.
“I would also like to thank all of our HAKUTO-R partners who have stayed with us since Mission 1, our new partners, our shareholders, and all of you who have supported us in various ways. We continue to make the necessary preparations for the launch of Mission 2.”

Mission 2
Mission 2, part of the HAKUTO-R lunar exploration program, will serve as the company’s second technological demonstration, based on lessons learned from Mission 1, with the objective of further validating the lander’s design and technology, as well as ispace’s business model to provide reliable lunar transportation and data services.
During Mission 2, ispace will conduct initial resource exploration activities, primarily with its micro rover, which is being designed, manufactured, and assembled by engineers in its ispace EUROPE office.
The exploration activities will be an important advancement in achieving ispace’s goal and vision of establishing the cislunar economy.
Mission 2 Micro Rover
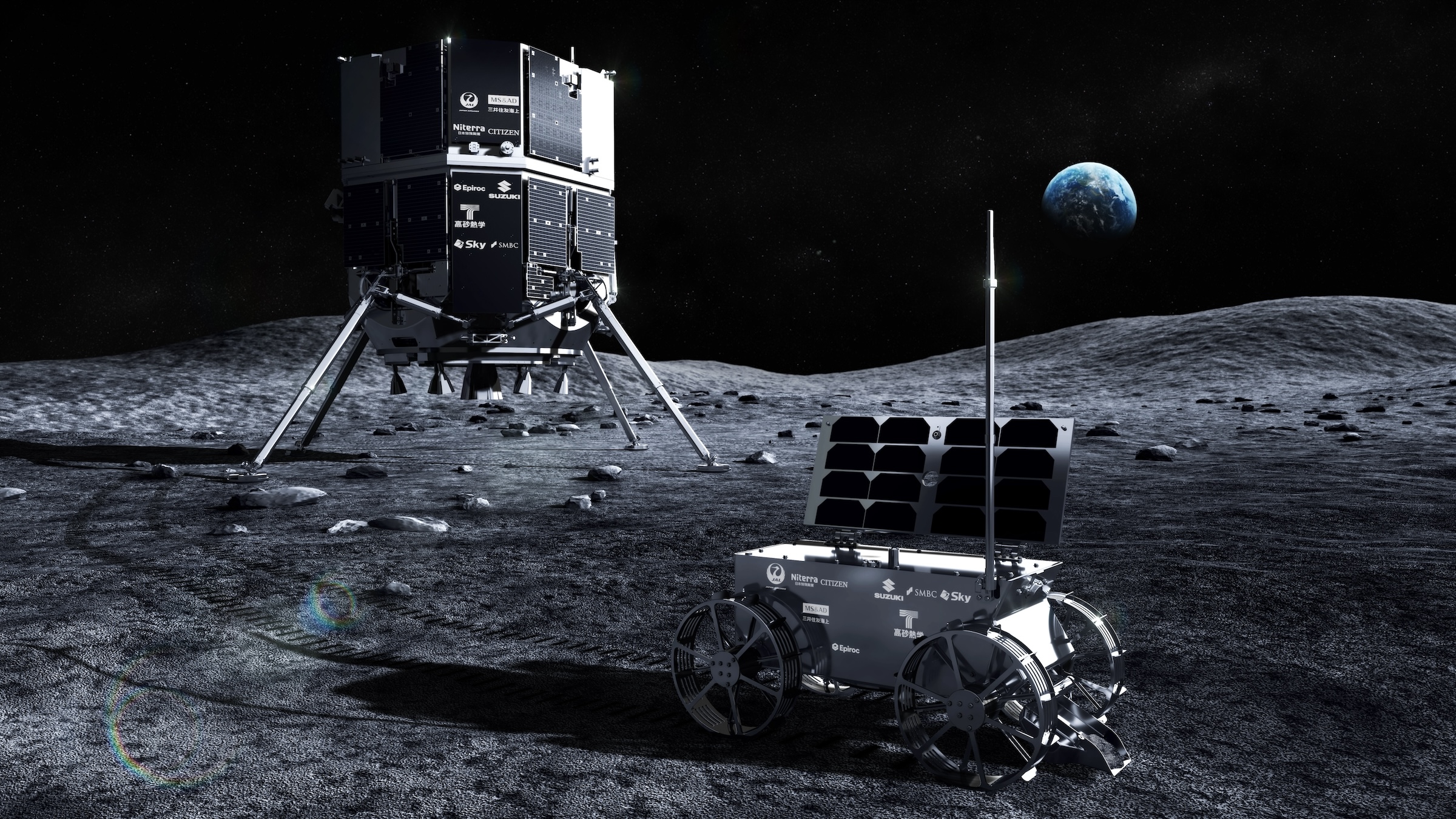
The micro rover is designed to be 26 cm tall, 31.5 cm wide, 54 cm long, and will weigh approximately 5 kg. It will be stored in the payload bay at the top of the lander and will use a deployment mechanism to land on the Moon’s surface after touchdown.
It is designed to be lightweight with a frame made of carbon fiber-reinforced plastics (CFRP) to withstand the rocket launch and other vibrations during transit to the lunar surface.
The rover is equipped with a forward-mounted HD camera that can capture images on the lunar surface. The wheels are shaped in such a way that the rover can traverse the lunar regolith in a stable manner. Commands and data will be sent and received from the mission control center via the lander.
The Mission 2 lunar exploration activities will also contribute to the NASA-led Artemis program. In December 2020, ispace EUROPE was selected by NASA to acquire regolith from the lunar surface to be purchased by the space agency.
In furtherance of this effort, a shovel developed by Epiroc AB, a leading productivity and sustainability partner for the mining and infrastructure industries, and a corporate partner participating in the HAKUTO-R program, will be mounted on the front of the micro rover.
Once on the lunar surface, operators plan to use the shovel to collect a sample of lunar regolith and photograph the collection with the camera mounted on the rover.
The micro rover is being developed with co-funding from the Luxembourg Space Agency through a European Space Agency contract with the Luxembourg National Space Programme, LuxIMPULSE.
Currently, an engineering model is being developed in Luxembourg. After completion of environmental tests on the engineering model, development of the flight model will begin. The rover is scheduled to be loaded onto the lander in Japan in the summer of 2024.
Mission 2 Lunar Lander Development Update
The Mission 2 flight model will employ the same overall design as the Series 1 lander used during Mission 1, capitalizing on its mission-proven performance.
Based on the final analysis of the flight data from its HAKUTO-R Mission 1, improvements will be incorporated into the Mission 2 flight model to reflect necessary software validation, expansion of the landing simulation range, and additional field testing of landing sensors to further improve mission accuracy.
ispace engineers have been assembling the flight model at JAXA’s facility in Tsukuba, Japan, since September 2023, for the purpose of completing final environmental testing prior to launch.
Assembly of the flight model is expected to be completed by Spring 2024, followed by the final environmental tests. Mission 2 is expected to launch on a SpaceX Falcon 9 rocket no earlier than Winter 2024.

Deepak Sen is a tech enthusiast who covers the latest technological innovations, from AI to consumer gadgets. His articles provide readers with a glimpse into the ever-evolving world of technology.
